一台外观酷似人类的人形机器人恒指配资开户,仅凭摄像头、机械肢体和电机等零件,它就能像人类一样具备“看、听、走、抓、说”的能力吗?
其实,真正让人形机器人“活”起来的核心,是一套“感知-理解/决策-控制-执行-反馈”不断循环的软硬件协同系统。

▲广晟控股集团所属广东省具身智能训练场的机器人
认识世界:
机器人的“五官”捕捉外部信息
人类通过眼、耳和皮肤感知外部世界,人形机器人也有专属的“感官系统”。这是人形机器人理解、规划和执行的起点。
在人形机器人身上,由摄像头、雷达、麦克风及各类状态传感器等设备共同构成感知系统,负责识别物体、规避障碍、接收指令,并实时监测自身状态。

▲人形机器人构成的核心系统示意图
谋定后动:
智能“大脑”自主规划行动
当人形机器人收集完感知信息后,决策交互系统就开始运转,它相当于机器人的“大脑”,负责把语音指令、视觉信息、环境状态和任务目标综合起来,理解任务并制定行动计划。
例如,人形机器人在接到“拿起桌上的杯子”的指令后,需要识别杯子位置、判断周边环境,并形成“靠近杯子-伸出手臂-稳定抓取”的行动计划。
协调动作:
“小脑”联动肢体协同发力
有了行动计划,就需要运动控制系统和执行驱动系统配合,转化为具体动作:运动控制系统就像“小脑”,负责把行动计划分解,并转化为精细的关节控制指令;执行驱动系统则是人形机器人真正“出手干活”的部分,通过灵巧手、机械手臂、躯干和下肢等部件的共同配合,完成抓取、搬运、行走、转向和平衡等动作。
拿起杯子的动作看似简单,但对于人形机器人而言,需要保持躯干平衡、多关节协同和力度精细控制。
根基保障:
“心脏”和“骨骼”筑牢运行基础
能源系统是人形机器人的“心脏”,负责提供稳定能量;坚固的机身框架是机器人的“骨骼”,承载所有的零部件和抵御磕碰,搭配可靠的散热系统,保障设备长时间稳定运行。
闭环协同:
软硬协同持续迭代进化
不少人会问:人形机器人完成一次动作就训练结束了吗?答案是否定的。
在人形机器人闭环系统中,人形机器人通过决策交互系统在感知外部环境和自身状态信息的基础上理解任务、生成计划;运动控制系统再将计划转化为控制指令;执行驱动系统完成具体动作,并通过状态反馈持续优化;能源系统则为全过程稳定运行提供基础支撑。
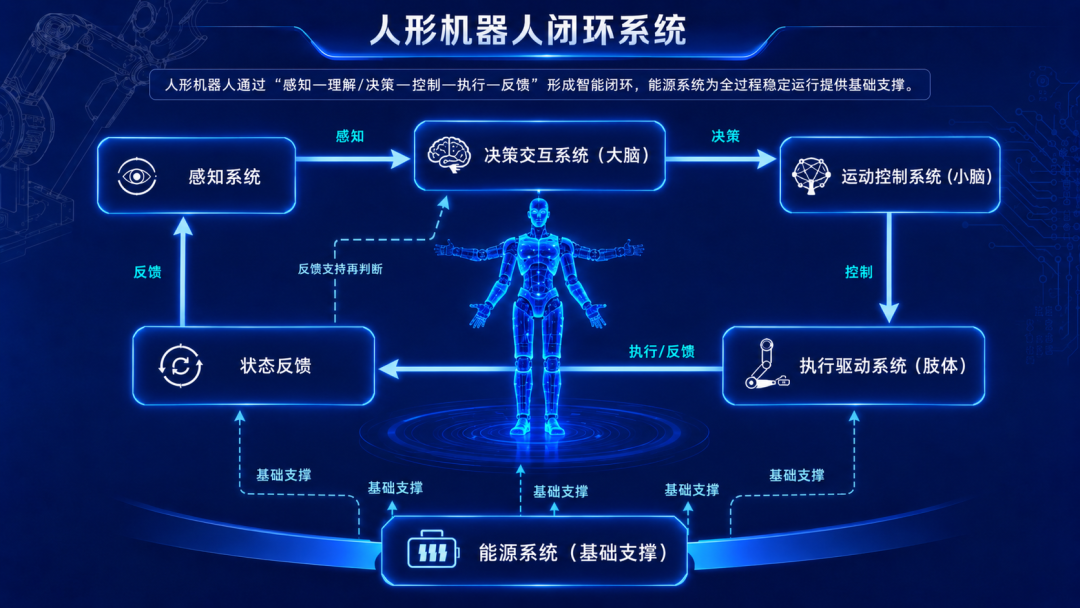
▲人形机器人闭环系统
软硬协同优化是人形机器人技术突破与商用落地的关键。闭环运转越顺畅,人形机器人在真实场景中的表现就越出色。而这种软硬协同能力,需要借助在专业训练场的反复实训,才能持续打磨升级。
接下来,广东省具身智能科技有限公司将持续围绕真实场景需求,推动具身智能场景训练、测试验证、数据沉淀和生态协同,让更多机器人真正走进场景、服务产业、创造价值。
排版校对丨李晓琪
责任编辑丨蔡玉娟
执行主编丨余晓莉
内容来源丨广晟控股集团恒指配资开户
广盛网app提示:文章来自网络,不代表本站观点。
- 上一篇:专业配资查询门户 林书豪解密尼克斯2026夺冠密码:不是巨星抱团,是集体意志
- 下一篇:没有了
相关文章



热点资讯